Odds and Ends
The Sensor Bike Helmet
I finally got tired of my old bike helmet and decided to put together a new one. It’s been on my to do list for the past few months. I stopped by the Fremont Recycle Cycles and asked if they had a Giro Indicator in stock. The clerk told me they only sell those at the U-District store, but offered to show what they stocked. I took a look and found a Uvex i-vo.
I had already installed my 808#26 camera inside the silver Giro Indicator, but it kept cutting out. I’m not sure if the internal battery or missing lens heat sink are to blame. Either way, the external power was messy. The 808#26 takes a special proprietary charging cable and I had trouble sourcing one to length.
Kind of off subject, but this was a source (USBFireware.com) of USB cables that offered custom builds. They don’t have the power cable for the 808#26, but do for the 808#16.
I decided to put it back in the box and move on with the Uvex helmet. The Uvex uses a 808#16 camera. This is a robust camera that I’ve field tested for over 2 years. I’m confident it will hold up. I dug out pits and trenches in the helmet to place all the electronics and wiring. The lens and microphone are extended from the camera main board. This helps conceal the devices and improves the quality of audio. I attempted to use a 5v 200mA solar panel to offset some battery drain, but I removed it because it looks a bit much.
To power the camera, I’m using a Concept Green USB battery pack that is rated for 5v at 2200mA. My previous packs were 5v at 2000mA. The increased capacity was a plus, but also it was smaller. I sourced a USB cable that will link the pack and camera, so I decided to hack the pack and embed it. The USB port is a small circuit board that is wired into a LiFEPO4 cell. I wired the pack board to the camera and fastened the cell to the helmet. Everything seemed to work fine.
During ride tests, I noticed that the camera kept shutting off unexpectedly. It turned out that the pack board had a chip with thermal grease that was sinked to the USB port. This heat dissipation was missing and I ended up frying the pack board. I ended up removing the old pack board, wiring, and cell from the helmet.
In the meanwhile, I have another Concept Green USB pack attached to the helmet. This time everything is stock and the power is supplied using the USB cable ports. I’ll have to order a custom 4 inch USB patch cable. This should tidy up the appearance.
The helmet is easy to work with and I’m considering it as the platform for sensor integration later on.
Powering the Helmet
I still like the hack I did with the Concept Green USB pack. Embedding and using the port and charging circuitry inside the helmet is ideal. Too bad about the heat dissipation requirements. I’ll have to get the circuitry design before I can make another attempt at it.
However, the battery cell was rather simple. I’ve sourced lithium ion cells before from BatterySpace.com for a few years now. I used a comparison to identifying one to use for this project. The 808 cameras draw an average of 400mA during operation. This gives me 5 hours of run time using a 2000mAh pack. I found 2 possible cells to use. The criteria to establish the better suited cell were, fail factor, price, power, weight, size, and duty. Fail factor is a quantity of cells, so if I had 4 cells for the pack, I had a fail factor of 4. Power is a product of the voltage and amp ratings which is measured in watts in hours. Duty is how many charge cycles can be applied to the cell before it starts to degrade. The rest are self explanatory, size is cubic mm.
Here are the results for these 2 cells, LTO 1865 and the LiFEPO4 26650. Now it’s not too difficult selecting which one to use.
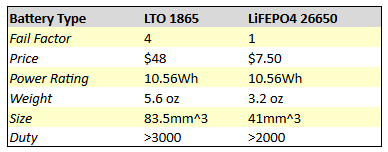
Another option for power was a solar panel. I still have to determine the correct way to connect it. I had picked up a couple of 5v 200mA panels at Fry’s. One panel fits ideally on the Uvex helmet and the wiring is well protected. It doesn’t provide enough current to power the 808 camera, but it offsets the drain from the battery. I estimated that it would be 70% efficient on average use, this meant it will provide 140mAh. This will extend the battery life a couple of hours, not too bad.
Titanium and the Apple
My last post held so much promise. The Titanium platform and source code for the iPhone app Mobile Logger made me think I was on the fast track to iOS development. One thing after another crept up and it became clear the road was a dead end. First came the errors when I tried to load the TDK on my computer and run it.
But wait, it does end there. I call this a show stopper. I’ll need a mac to develop iOS apps.

That settles that, iOS development isn’t happening any time soon.
808-16 Action Camera
The folks in the trenches have it spot on. I happened to find a feature that has been enabled with a new firmware for the 808-16 action camera. Now this inexpensive and small 720p camera allows shots in time lapse as well as video when motion is detected. With so much crippleware out on the web, it is refreshing to find technology heading in the correct direction for the public to use.
More than meets the eye
During a vacation in Maui, I decided to shoot some time lapse video of our view. It revealed a lot about what the weather does through out the day. The video was captured using my 808-16 camera and is actually built from a series of jpg images using JPGVideo. The jpg files contain a unique mix of data that can be used as well.
The camera was pointed off of a deck, but I didn’t take the time to note the heading. Luckily, finding the heading after the fact isn’t too difficult. I can start with my camera as a reference point, it helped that I took a picture of were on the deck it sat.


All I had to do was open one of the JPG files and find the center of the FOV. With the camera reference point and heading, I took a compass and got the heaading, 312 degrees NW. This was nice to know, but since the camera also had a wide angle lens attached, I wanted to know the heading range through out the FOV. To get this, I did the same trick, but pointed the compass to the far edges of the FOV. The left edge read 278 degrees W, while the right edge read 354 degress N. The total angular FOV from this method of measurement gave me 76 degrees. I halved the difference of the left and right edges and added it to the left edge reading. It was off by 4 degrees, so there is some error. Not surprising, since the compass and visual methods are not exact.
Histogram data seems more precise, but the problem I face is how to get the histogram from each JPG. I did find a command line tool that does extensive image processing called ImageMagick. There was a command to process histograms midway down that link. The program has yet to be tested by me and I’m reluctant to take a stab at it right now.
There is a competition currently going on from the folks at Dashware. They are asking users of Dashware to submit up to 3 videos that contain data overlaid with data using their software. The prize is a respectable $500, that’s redeemable on Amazon’s website. I looked at videos that have been submitted and none show a time lapse video with data imported. Hell, I think I’ll be the first, provided I don’t get beat out by someone reading my post and taking it for themselves. Here it is…
Micheal at Dashware kindly reset my password and I submitted my video.